简介
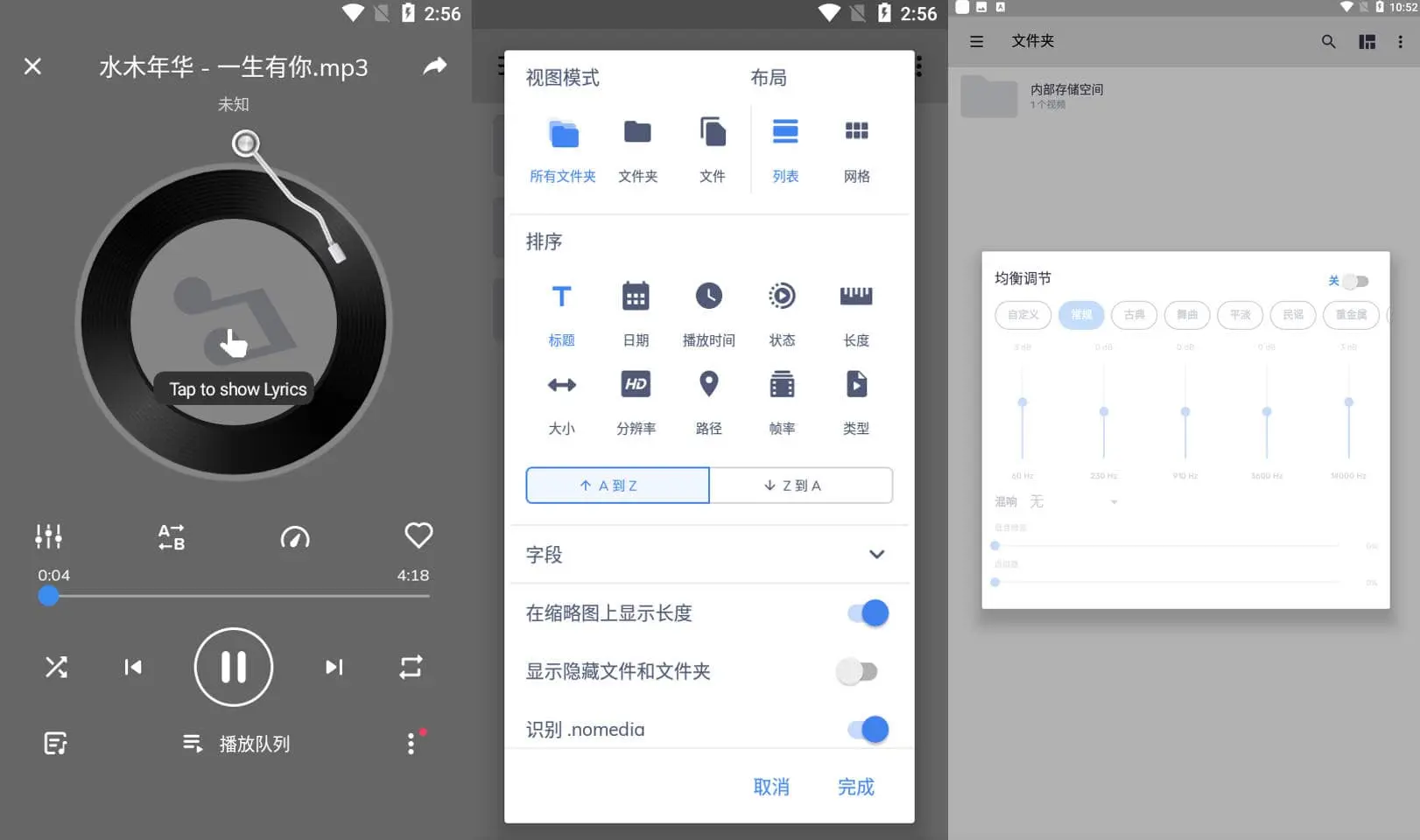
MX 播放器(MX Player)安卓平台知名的多媒体播放器,影音发烧友必备本地视频播放器,它以强大的解码性能及兼容性闻名,对字幕的支持堪称一绝,能兼容特效字幕,支持在线字幕匹配,看外语片无需找字幕!
软件特点
a) 支持几乎所有音频格式 – MX Player 是安卓市场功能最强大的视频播放器,支持几乎所有的音频格式,包括 AC-3,WMA,MP3,AAC 等。
b) 多核解码——MX 播放器是第一款支持多核解码的 Android 视频播放器。测试结果证明多核设备的性能比单核设备提高多达 70%。
c) 轻捏即可缩放、平移——轻捏和滑动屏幕轻松进行缩放。缩放和平移在选项中也可用。
d) 字幕手势——前/后滚动跳转到下一/上一文本。上/下滚动使文本上下移动。缩放改变文本大小。
e) 儿童锁——让您的孩子得到娱乐而不必担心他们拨打电话或接触其他应用。
修改日志
MX Player – Google Play https://play.google.com/store/apps/details?id=com.mxtech.videoplayer.ad
MX Player Pro – Google Play https://play.google.com/store/apps/details?id=com.mxtech.videoplayer.pro
软件下载
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END